A novel actuated gait simulator has been developed that fits inside a typical shoe and has sufficient load capability and range of motion to mimic adult gait patterns. The control system includes passive ankle stiffness which is responsible for a more biomechanical behavior. The ankle demonstrates passive ankle stiffness when irregular terrain is encountered. Beyond the present application of the device as a testing platform for haptic smart orthotics, it can also be used as a test platform for studying slip events between different types of shoes and varying terrain. In order to have more realistic and biomechanical responses, a centralized control system is being developed which will perform based on a biomechanical model of human gait .
The AFS robot
Robotic Ankle Foot Simulator
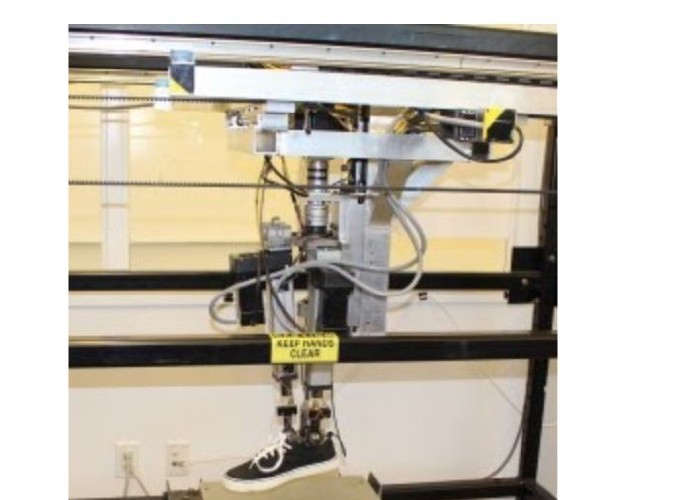 The AFS robot
The AFS robot
