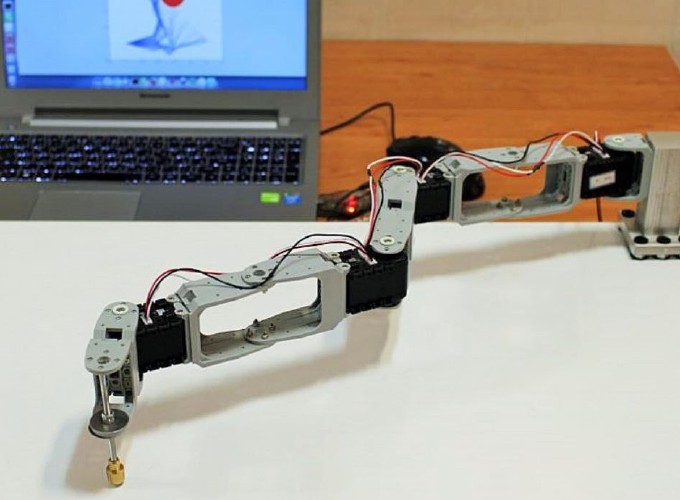
In this project we focused on making the motion planning of the robots fault-tolerant. We started with the simple Pseudo inverse approach to making the joint trajectory planning of planar redundant serial robots the fault tolerant. We made a 4-DOF planar robot (TaArm) to do the experimental studies to show the performance of the proposed method.

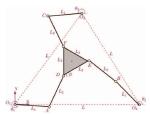
End-effector’s linear velocity of the manipulator. The failure occurs at tf = 15s and the simulation time is 20s.
The Pseudo inverse method has some limitations so we mixed the failure-tolerant problem with optimal motion planning problem and provided an algorithm that solves both at the same time. The new algorithm is based on convex optimization, MPC, and quadratic programming and prevents collision between obstacles/human and robot by real-time re-planning and minimizes harmful velocity jumps when a failure occurs in robot actuators while the robot completes the desired task. We modeled the joint failure into the optimization problem and solved task completion problem, minimizing velocity jump due to failure problem and optimal collision-free motion planning problem at the same time.