Human posture estimation has been a challenging research problem and many solutions has been suggested for different applications. Mainly, marker-based motion capture system and markerless camera-bases systems are the most common methods to estimate human posture. Marker-based solutions are usually more accurate however they require a long preparation time for setting up parkers and calibration of mocap systems. Markerless are more convenient since they does not requires attaching markers on human body. Both of those methods are based on using cameras and have many limitation in real applications. with the recent developments in physical human-robot interaction, estimating human posture is a demanding task specially in ergonomics and safety analysis, and adaption of robot motion based on human posture and motion. In this project we propose a novel method to estimate human posture in telemanipulation. We believe that in physical interaction between human and the robot, only knowing the robot’s trajectory is adequate to estimate the human’s posture. We model the problem as a partially-observable dynamic model and use filtering and smoothing approaches to solve the problem.
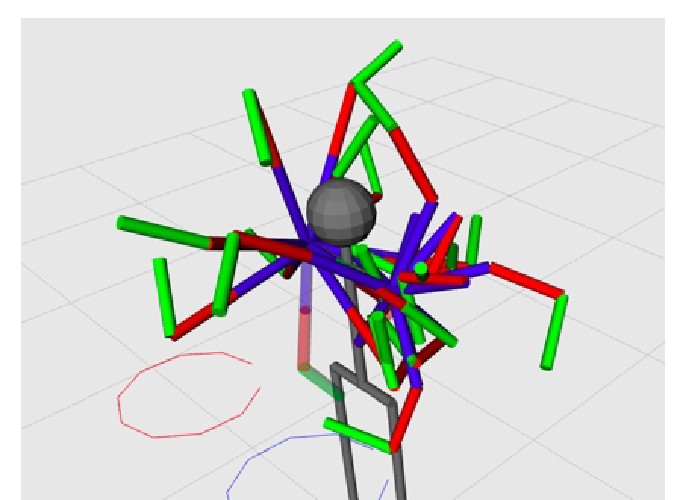
Visualizing particles from human model to estimate the posture
Human Posture Estimation in p-HRI
 Visualizing particles from human model to estimate the posture
Visualizing particles from human model to estimate the posture
Human Posture Estimation in p-HRI

Publications
Is The Leader Robot an Adequate Sensor for Posture Estimation and Ergonomic Assessment of A Human Teleoperator?
Ergonomic analysis of human posture plays a vital role in understanding long-term, work-related safety and health. Current analysis is …
