Roya Sabbagh Novin
I am a Behavior Planning Software Engineer at Embark Trucks. I got my Ph.D. from Utah Robotics Center, University of Utah, under supervision of Prof. Tucker Hermans (Utah Learning Lab for Manipulation Autonomy (LL4MA Lab)) and Prof. Andrew Merryweather (Laboratory of Ergonomics and Safety). As a roboticist, I am very passionate about probabilistic robotics, especially human-aware planning for autonomous systems. My Ph.D. research includes robot learning, mobile manipulation planning and risk-aware planning.
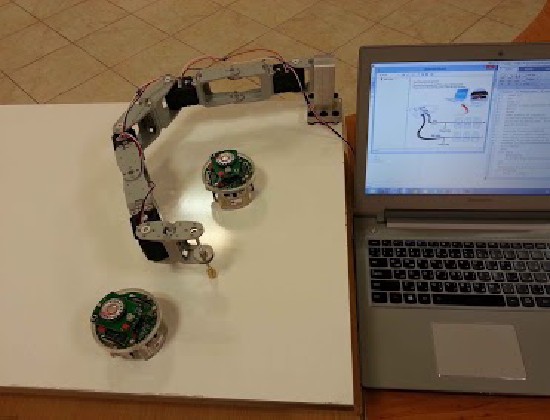
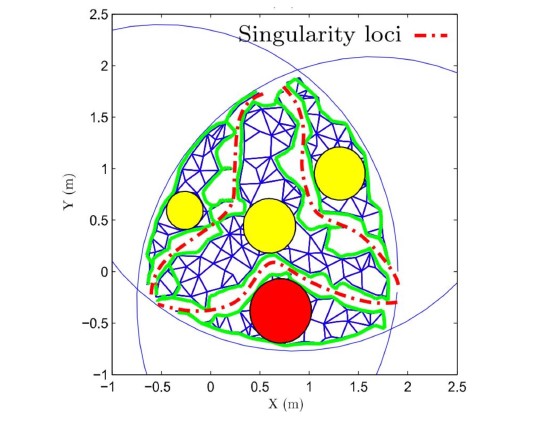
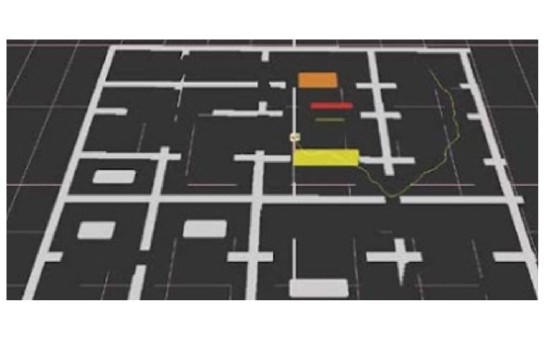
Previously, in my masters at Human and Robot Interaction Laboratory (TaarLab), I have worked on collision-free motion planning using model predictive control approach and implemented several methods on various robots including mobile robots, parallel and serial manipulators.
Out of robotics world, I love baking, oil painting and hiking.
Email: sabbaghnovin@gmail.com
Interests
- Risk-aware planning
- Motion planning
- Probabilistic robotics
- Human-robot interaction
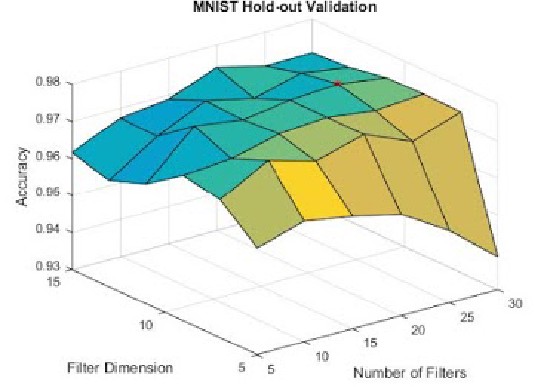
- Robot learning
- Autonomous systems
Education
-
PhD, Mechanical Eng.- Robotics, 2020
University of Utah
-
MSc, Mechatronics Eng., 2015
University of Tehran
-
BSc, Mechanical Eng., 2011
Sharif University of Technology