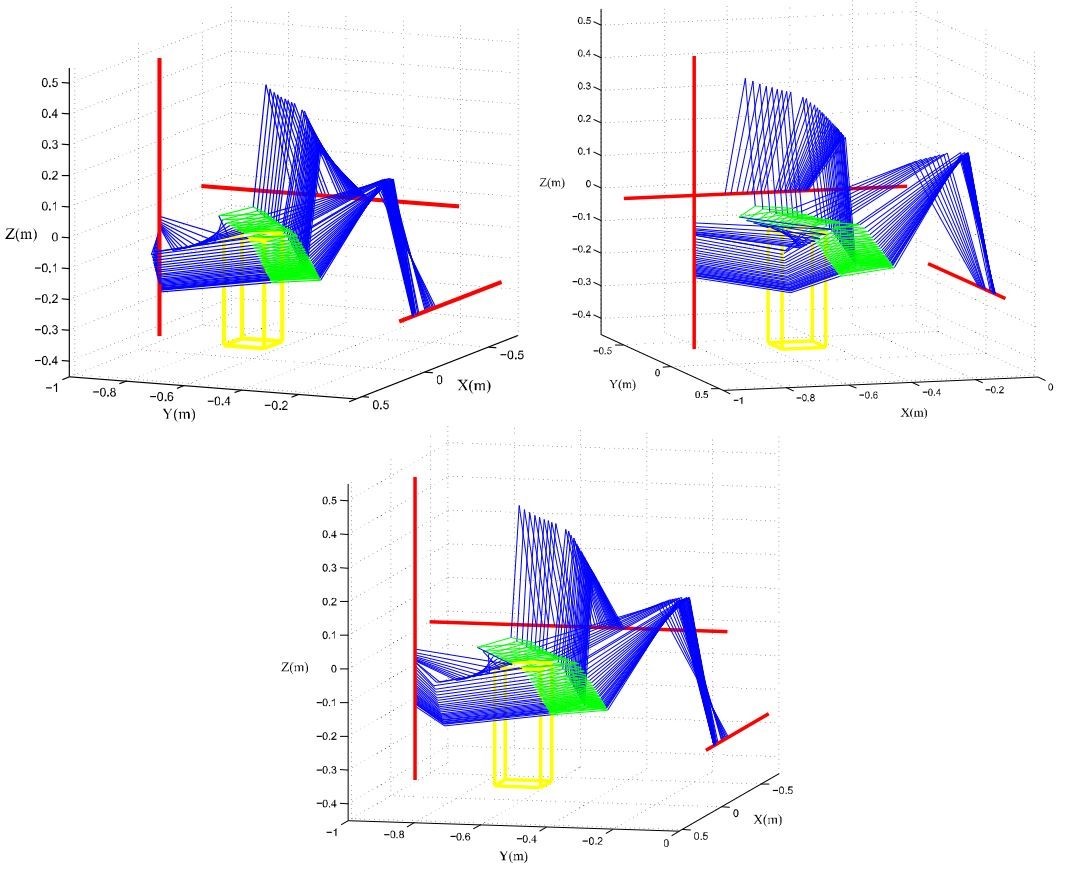
This project focuses on the optimal path planning of redundant planar serial robots, while avoiding obstacles within its workspace. A synergy-based algorithm between convex optimization, disjunctive programming and receding horizon is employed to the end of achieving advantages such as finding the global optimum solution and low computational time.
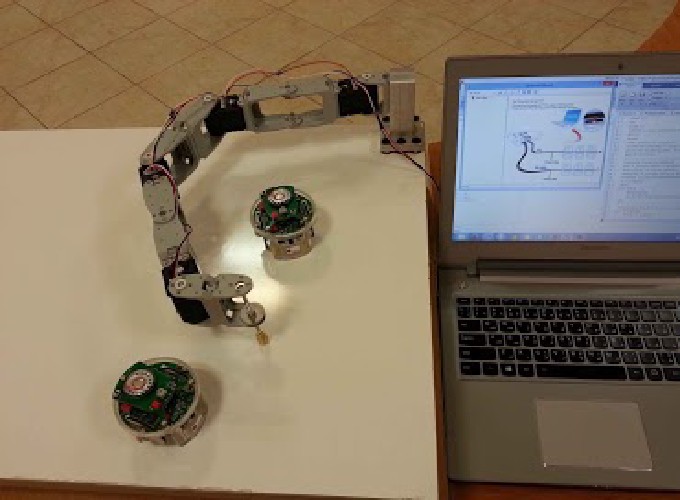
This algorithm can handle both static and dynamic obstacles due to its replanning scheme. It has been implemented on redundant serial robots, parallel robots, mobile robots and a group of mobile robots.
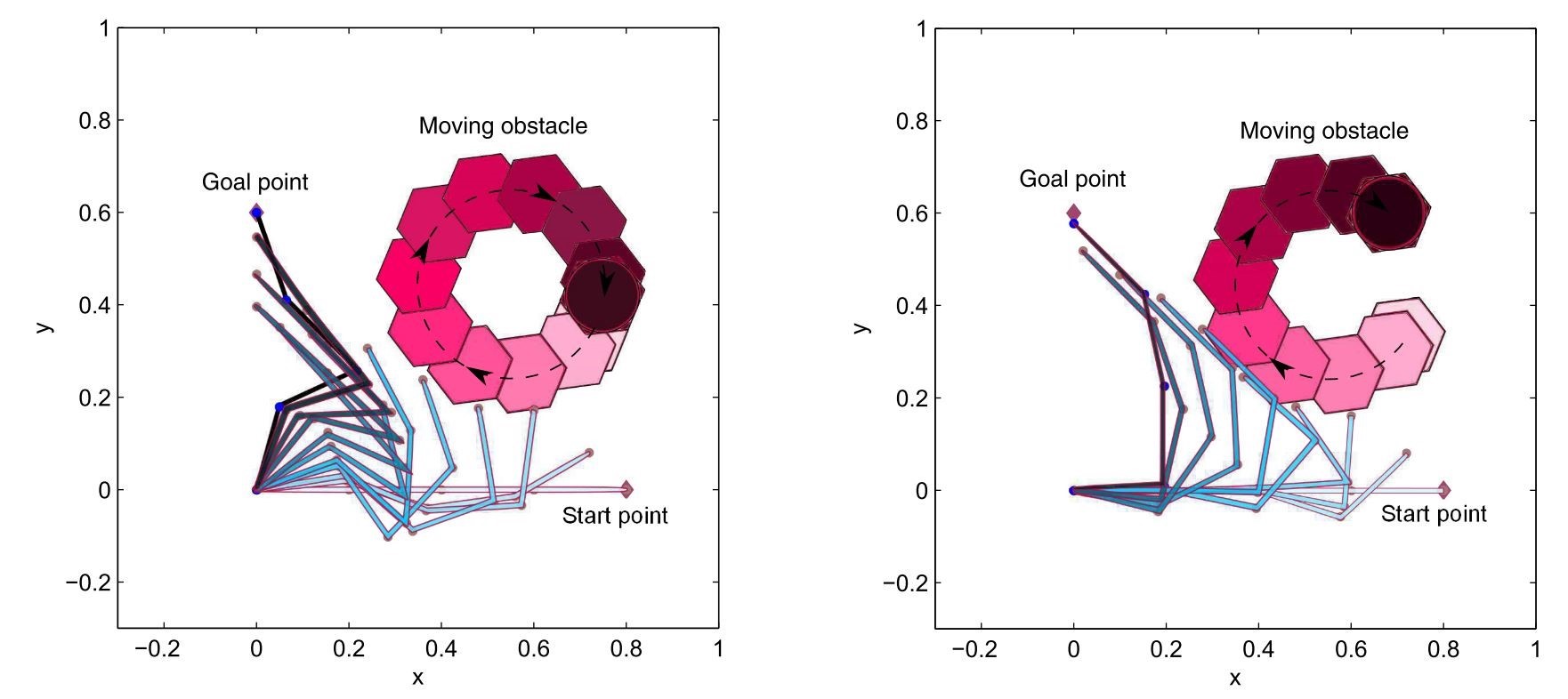
Simulation results of minimum time (left) and minimum path (right) optimal path planning with dynamic obstacles.